Bild 1: Definierte Positionen des Spiegels
Spiegelkammer
Schnelle Spiegelkammer
Elektronikgruppe Zeuthen
Schnelle Spiegelkammer
Forschungsziel
Siliziumspiegel werden beim FLASH-Experiment genommen, um das erzeugte Laserlicht in verschiedene Beamlines zu leiten bzw. zu reflektieren. Der ursprüngliche Betriebsmodus war dabei aber stark begrenzt, da immer nur eine Beamline bzw. Experiment für Tage oder gar Wochen mit Laserlicht versorgt wurde, während die Anderen keine Messungen durchführen konnten.
Unsere Lösung ist dabei folgende: An den Verzweigungspunkten wird eine schnelle Spiegelkammer eingebaut, die getaktet zwei Beamlines mit Laserlicht versorgt und dadurch die Anzahl gleichzeitiger Experimente vergrößert.
Anforderungen an die SpiegelkammerDie Anforderungen an die Spiegelkammer können wie folgt zusammengefasst werden:
Die definierten Spiegelpositionen können in Bild 1 gesehen warden, während Bild 2 schematisch zeigt wie die Spiegelposition zeitlich zu Laserpulsen steht. |
|
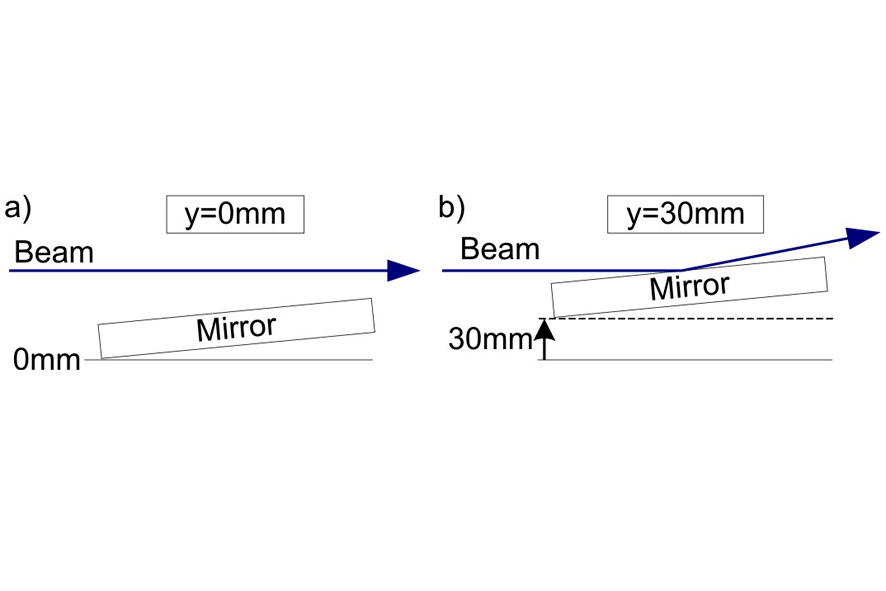 |
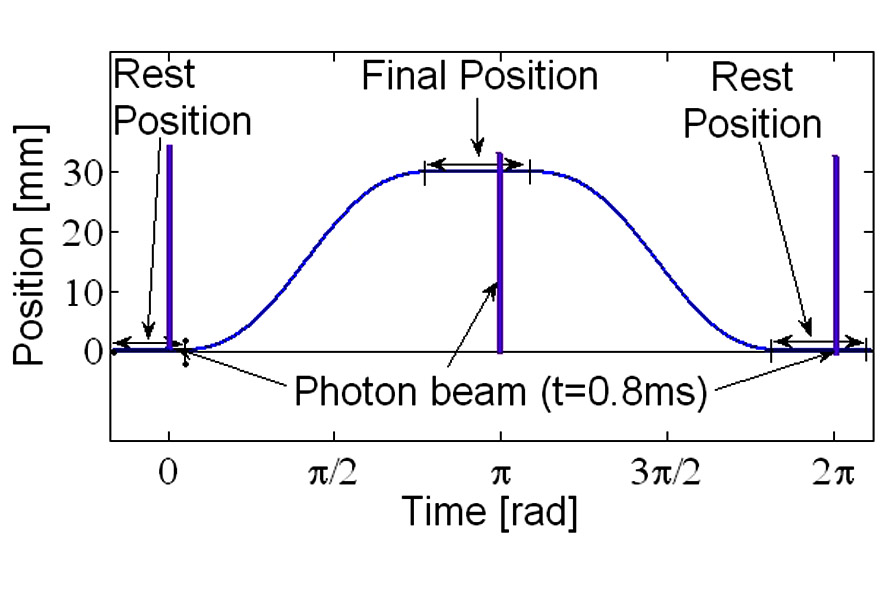
Bild 2: Zeitschema für die Bewegung des Spiegels |
Testaufbau mit Vakuumkammer und Antriebssystem |
|
|
Der Labor-Testaufbau ist in Bild 3 gezeigt, wobei die sichtbaren Hauptkomponenten mit Pfeilen gekennzeichnet sind. |
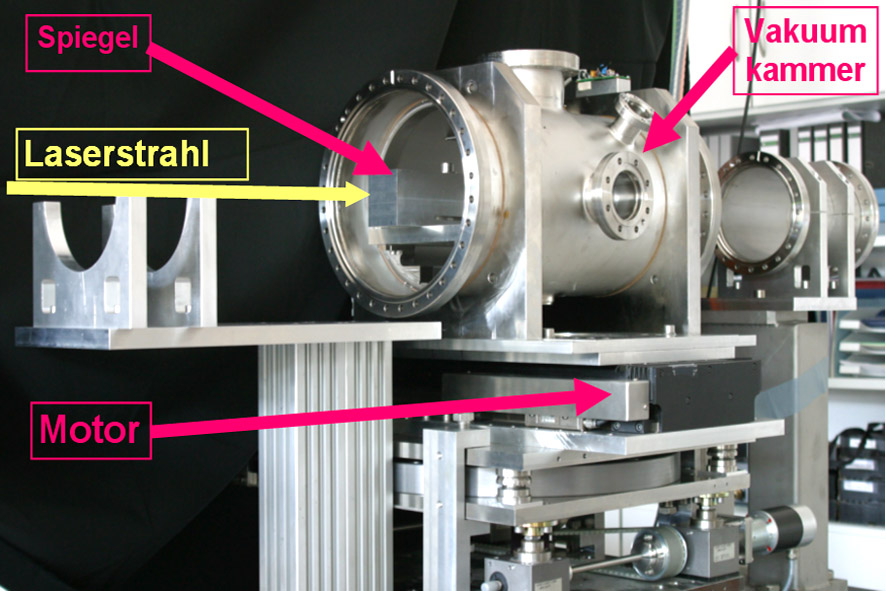
Bild 3: Testaufbau |
Vereinfachtes Blockbilddiagramm der SpiegelsteuerungEin vereinfachtes Blockschaltbild des Regelkreises ist in Bild 4 dargestellt. Die einzelnen Komponenten der Spiegelsteuerung sind dabei folgende:
|
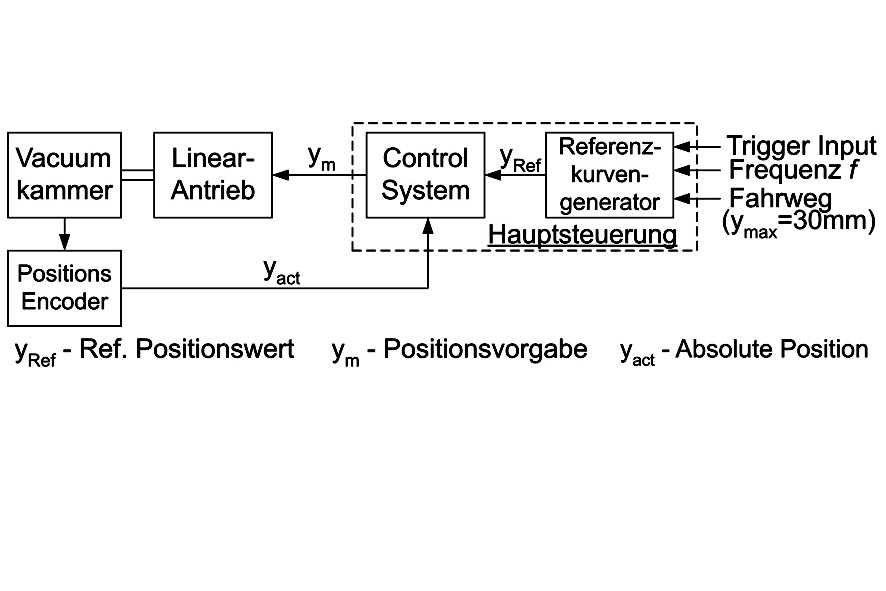
Bild 4: Blockbild der Spiegelsteuerung |
Ergebnisse von Messungen mit dem TestaufbauMessung der PositioniergenauigkeitDie aktuelle Lage der Spiegelkammer in Bezug auf die vorgegebene Endlagenposition ist in Bild 5 für 2 verschieden Frequenzen gezeigt. Das blaue Kreuz zeigt dabei den Zeitpunkt an, wenn der Laserpuls auf den Spiegel trifft. |
|
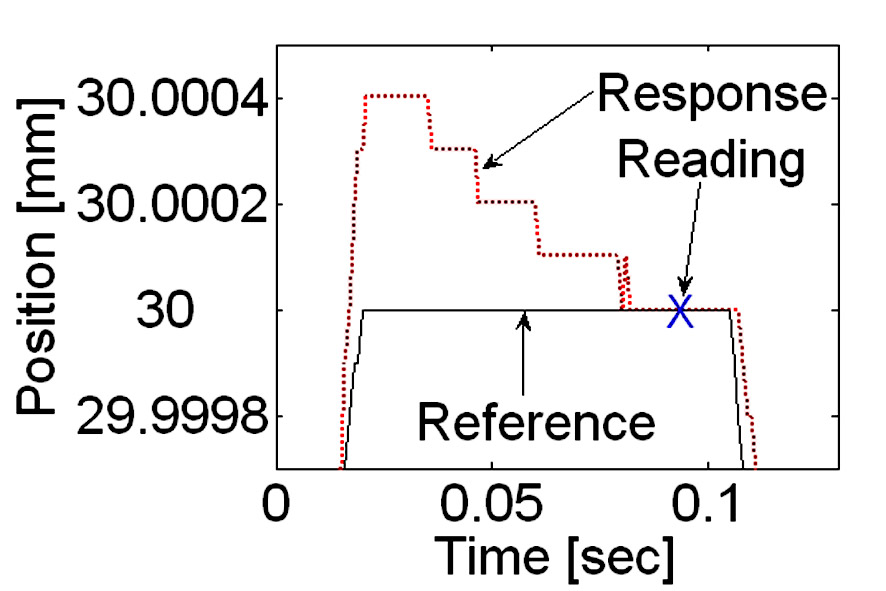
Bild 5a: Positioniergenauigkeit |
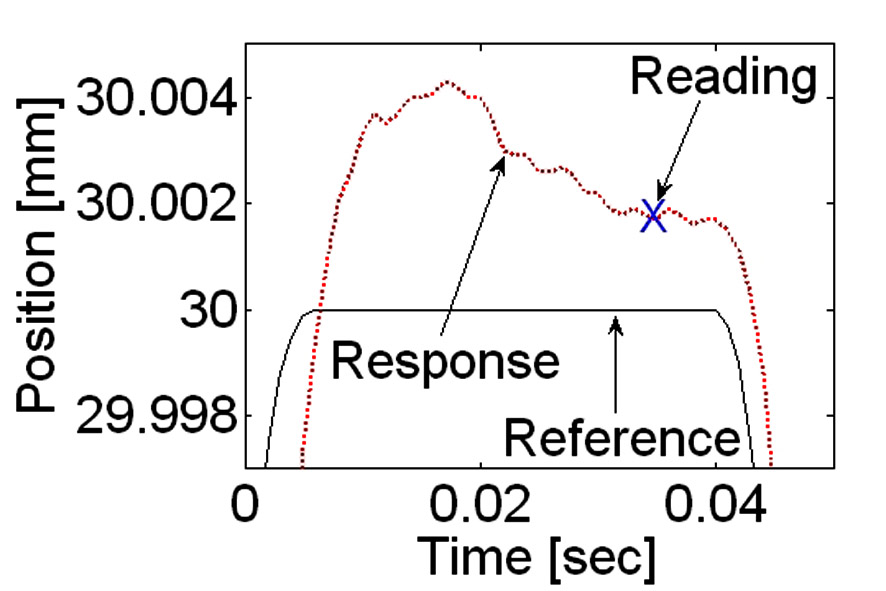
Bild 5b: Positioniergenauigkeit |
Messung der Winkelabweichung vom SpiegelDer jeweilige gemessene Winkelfehler ist in Bild 5 für eine Anzahl von Messungen dargestellt. Die dazugehörige Gauss-Verteilung ist in Bild 6 gezeigt. Es kann gesehen werden, dass Standard-Abweichung etwa 0,6 arcsec beträgt und somit den Vorgaben entspricht. Angenommen, dass die Experimente etwa 20 m vom Spiegel entfernt sind, resultiert dieser Winkelfehler in eine Positionsverschiebung von weniger als 100 μm, wobei der Laserstrahl einen Durchmesser von 3 mm hat. Der empfindlichste Positionierparameter ist ein möglicher Winkelfehler des Spiegels in der horizontalen Achse. Der Winkelfehler wurde hier in der Spiegelendlage mit dem Autocollimator ELCOMAT 3000 gemessen, welcher folgende Werte hat:
Der jeweilige gemessene Winkelfehler ist in Bild 5 für eine Anzahl von Messungen dargestellt. Die dazugehörige Gauss-Verteilung ist in Bild 6 gezeigt. Es kann gesehen werden, dass Standard-Abweichung etwa 0,6 arcsec beträgt und somit den Vorgaben entspricht. Angenommen, dass die Experimente etwa 20 m vom Spiegel entfernt sind, resultiert dieser Winkelfehler in eine Positionsverschiebung von weniger als 100 μm, wobei der Laserstrahl einen Durchmesser von 3 mm hat. |
|
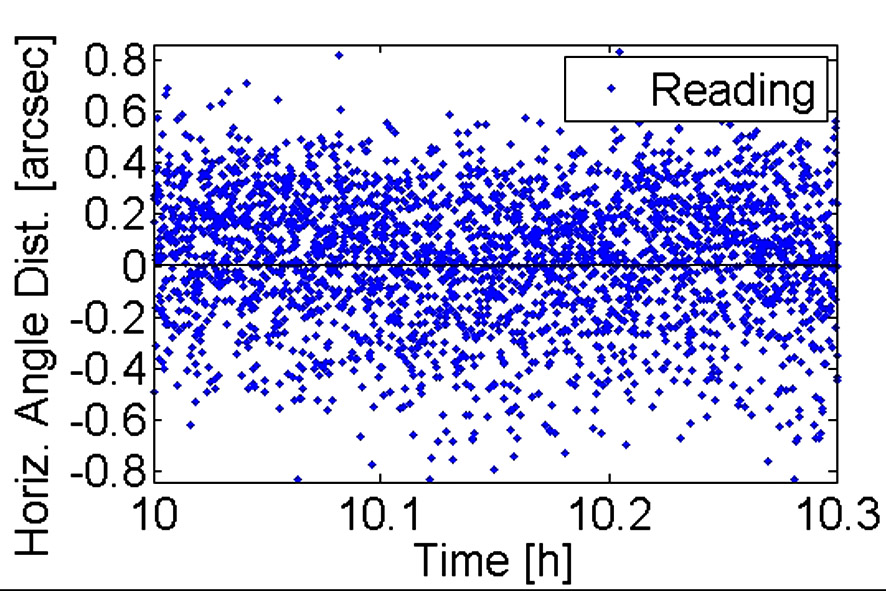
Bild 6: Horizontale Winkelgenauigkeit (f=2.5Hz): |
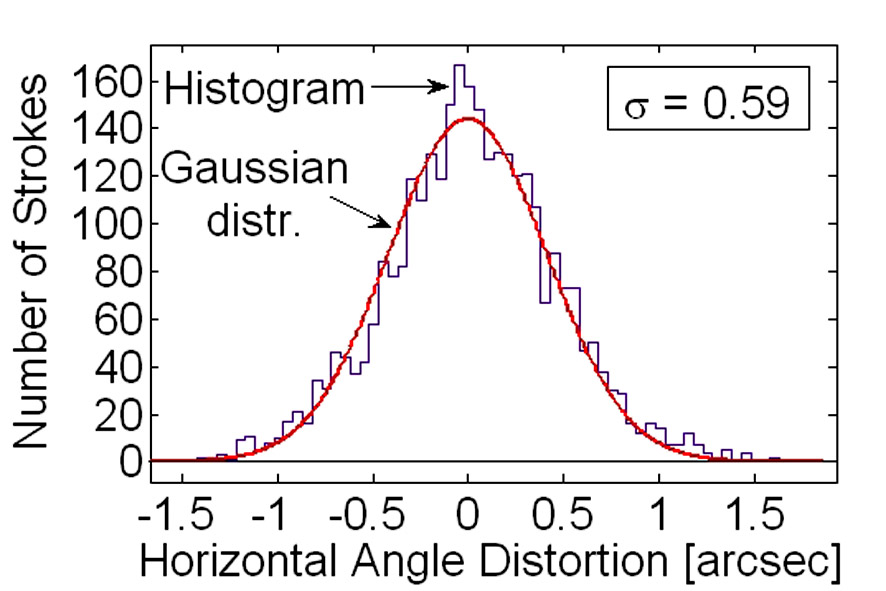
Bild 7: Gauss-Verteilung (f=2.5Hz): |